Hallo,
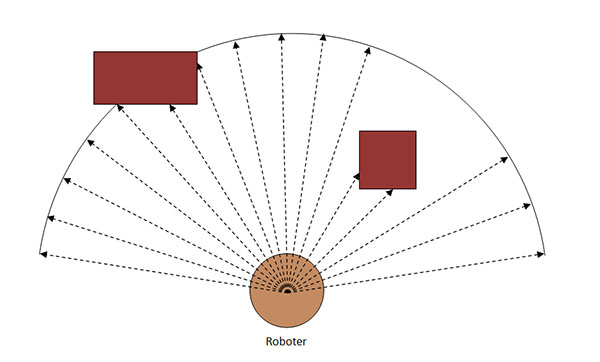
ich baue seit einiger Zeit mit Freunden im Rahmen einer Schul-AG an einem Roboter. Zur Orientierung verwenden wir einen schwenkbaren Infrarot-Entferungsmesser, der ca. 20 Messungen pro Sekunde schafft.
Die Messdaten werden von einem Arduino I/O-Board erfasst und dann an einen Laptop geschickt, das klappt auch schon soweit.
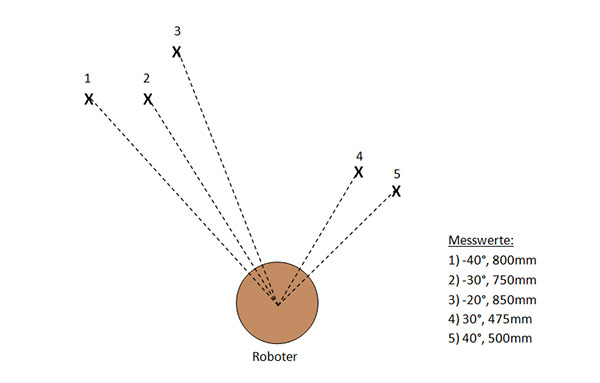
Jetzt wollen wir die gemessenen Punkte in ein Koordinatensystem eintragen, das hauptsächlich dazu dienen soll, zu prüfen ob ein Hindernis auf einer bestimmten Strecke liegt.
Da wir eher Einsteiger sind, was das Programmieren angeht, sind wir uns nicht sicher wie man so ein Koordinatensystem in Java am besten umsetzt.
Damit wir nicht zu viel Zeit und Arbeit an einem umständlichen Lösungsweg verschwenden, wollte ich hier nach der besten Lösungsrichtung fragen.
Mit welcher Klassenbibliothek können wir so ein Koordinatensystem am besten umsetzen?
Durch googlen bin ich auf folgendes gestoßen:
- Java2D
- ein zweidimensionales Array als Koordinatensystem
- awt.geom
Ich denke man hört heraus, dass ich ein blutiger Anfänger bin. Aber wir wollen das Programmieren beim Machen lernen, daher wäre es super, wenn ihr uns grob in die richtige Richtung schickt, damit wir uns nicht unnötig abstrampeln.")
ich baue seit einiger Zeit mit Freunden im Rahmen einer Schul-AG an einem Roboter. Zur Orientierung verwenden wir einen schwenkbaren Infrarot-Entferungsmesser, der ca. 20 Messungen pro Sekunde schafft.
Die Messdaten werden von einem Arduino I/O-Board erfasst und dann an einen Laptop geschickt, das klappt auch schon soweit.
Jetzt wollen wir die gemessenen Punkte in ein Koordinatensystem eintragen, das hauptsächlich dazu dienen soll, zu prüfen ob ein Hindernis auf einer bestimmten Strecke liegt.
Da wir eher Einsteiger sind, was das Programmieren angeht, sind wir uns nicht sicher wie man so ein Koordinatensystem in Java am besten umsetzt.
Damit wir nicht zu viel Zeit und Arbeit an einem umständlichen Lösungsweg verschwenden, wollte ich hier nach der besten Lösungsrichtung fragen.
Mit welcher Klassenbibliothek können wir so ein Koordinatensystem am besten umsetzen?
Durch googlen bin ich auf folgendes gestoßen:
- Java2D
- ein zweidimensionales Array als Koordinatensystem
- awt.geom
Ich denke man hört heraus, dass ich ein blutiger Anfänger bin. Aber wir wollen das Programmieren beim Machen lernen, daher wäre es super, wenn ihr uns grob in die richtige Richtung schickt, damit wir uns nicht unnötig abstrampeln.